เทคโนโลยีมือหุ่นยนต์ต้นแบบ จากเกาหลีใต้ ทำงานใกล้เคียงมือมนุษย์จริง
- Share :



- 1,420 Reads
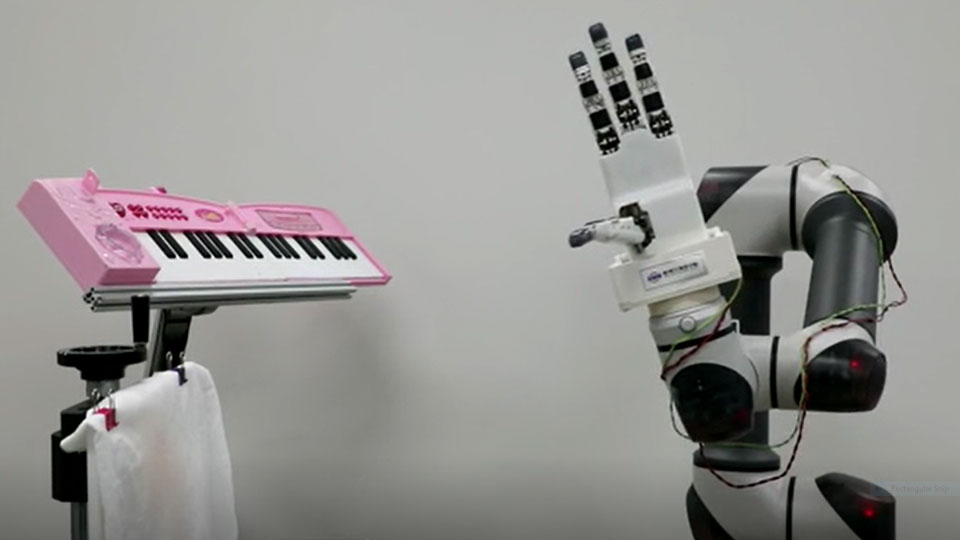
ในอุตสาหกรรมหุ่นยนต์นั้น การพัฒนามือหุ่นยนต์ให้ทำงานได้เทียบเท่ามือมนุษย์ หยิบจับ และใช้งานเครื่องมือต่าง ๆ อย่างคล่องแคล่ว ซึ่งเป็นหนึ่งในเป้าหมายที่นักวิจัยจำนวนมากให้ความสนใจ เนื่องจากหากทำได้สำเร็จ มือหุ่นยนต์เหล่านี้จะมีบทบาทสำคัญในแทบทุกภาคอุตสาหกรรม ซึ่ง(Korea Institute of Machinery & Materials: KIMM) ได้เผยมือหุ่นยนต์ต้นแบบ ที่มีน้ำหนักเพียง 1 กิโลกรัม แต่หยิบจับวัตถุหนักได้ถึง 3 กิโกกรัม และทำงานละเอียดอย่างการเทน้ำ หรือกระทั่งเล่นเปียโนได้
คณะวิจัยจาก KIMM นำโดย Dr. Hyunmin Do นักวิจัยจากสาขาหุ่นยนต์ และเมคคาทรอนิกส์ ภายใต้แผนก Advanced Manufacturing Systems Research Division พัฒนามือหุ่นยนต์ โดยจำลองโครงสร้าง และการเคลื่อนไหวจากมือมนุษย์ มีข้อต่อทั้งหมด 16 จุด และใช้มอเตอร์ 12 ตัวในการขยับ และกลไกการเคลื่อนไหวเพื่อให้สามารถทำงานใกล้เคียงมือมนุษย์จริงได้มากขึ้น และประสบความสำเร็จในการออกแบบให้มือหุ่นยนต์รุ่นนี้มีน้ำหนักเพียง 1 กิโลกรัม ยกวัตถุหนักได้ 3 กิโลกรัม และสามารถนำไปติดกับแขนหุ่นยนต์ได้หลายรุ่น
ที่แล้วมา มือหุ่นยนต์ทั่วไปมีข้อจำกัดในการใช้งานจากระบบขับเคลื่อนและเซนเซอร์ที่ส่วนมากไม่ได้ถูกติดตั้งไว้ภายใน ในขณะที่ Dr. Hyunmin Do ชี้แจงว่า มือหุ่นยนต์ที่ถูกพัฒนาขึ้นนี้ ใช้เซนเซอร์หลายชนิดในการทำงาน โดยชนิดแรกเป็น Force Sensor ฝังไว้ในส่วนปลายนิ้ว และฝ่ามือของหุ่นยนต์ ถัดมาเป็น Torque Sensor แบบหลายแกน ทำให้การควบคุมแรงบีบทำได้ละเอียดขึ้น และท้ายสุดคือ Tactile Sensor ซึ่งร่วมกันพัฒนากับ Seoul National University
ด้วยการออกแบบเหล่านี้เอง ทำให้มือหุ่นยนต์มีลักษณะใกล้เคียงกับมือจริง สามารถหยิบจับสิ่งของได้ใกล้เคียงมือมนุษย์ รวมถึงการจำลองการใช้งานเครื่องมือต่าง ๆ เช่น ใช้กรรไกรตัดกระดาษ เทน้ำ เล่นเปียโน และอื่น ๆ ด้วยแรงจับสูงสุดในโลกในขณะนี้เมื่อเทียบกับน้ำหนักตัว ซึ่งคณะวิจัยตั้งเป้าว่า มือหุ่นยนต์รุ่นนี้จะถูกนำไปต่อยอดในภาคอุตสาหกรรมต่าง ๆ ได้ในท้ายสุด
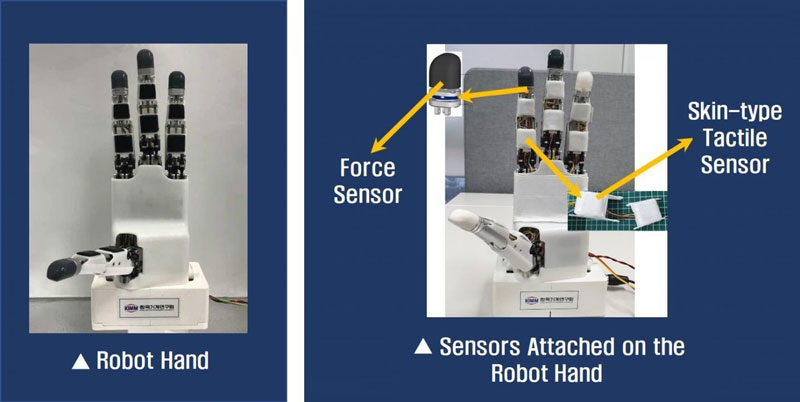
Photo: Korea Institute of Machinery and Materials (KIMM)




